


Máquina de apriete de tornillos robótica colaborativa de seis ejes

Parámetro del dispositivo
| Modelo | GR-XFXZ950 |
| Alcance del robot | 950 mm |
| Carga final del robot | 16 kg |
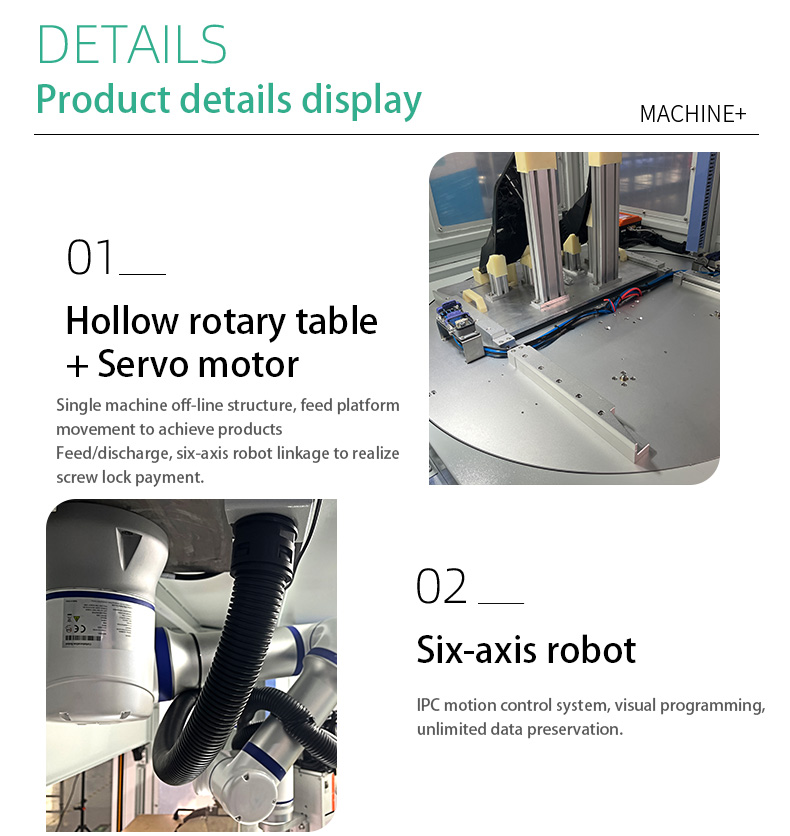
| Plataforma de alimentación | Mesa giratoria de control central + servomotor |
| Método de alimentación | Soplar/aspirar son compatibles |
| Rendimiento de bloqueo | 99,95% |
| Fuente de alimentación en funcionamiento | CA 220 V |
| Fuente de aire de trabajo | 0,4-0,7 MPa |
| fuerza | Aproximadamente 2,5 kW |
| Establecer el método de coordenadas | Posicionamiento visual |
| Dimensiones exteriores (L*An*Al) | 1400*1900*1950 mm |
| Peso (KG) | 800 |
| Condición | Nuevo |
| Garantía de los componentes principales | 2 años |
Características del dispositivo
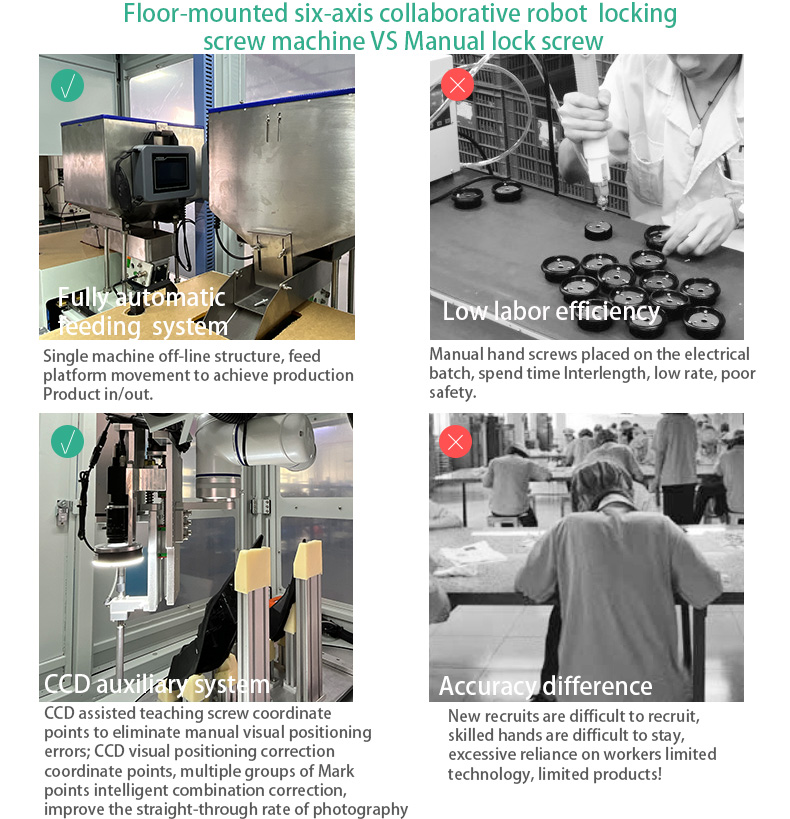
1. Estructura fuera de línea de una sola máquina, movimiento de la plataforma de alimentación para lograr la entrada/salida del producto, enlace de robot de seis ejes para lograr el pago con bloqueo de tornillo
2.Sistema de control de movimiento IPC, programación visual, almacenamiento de datos ilimitado;
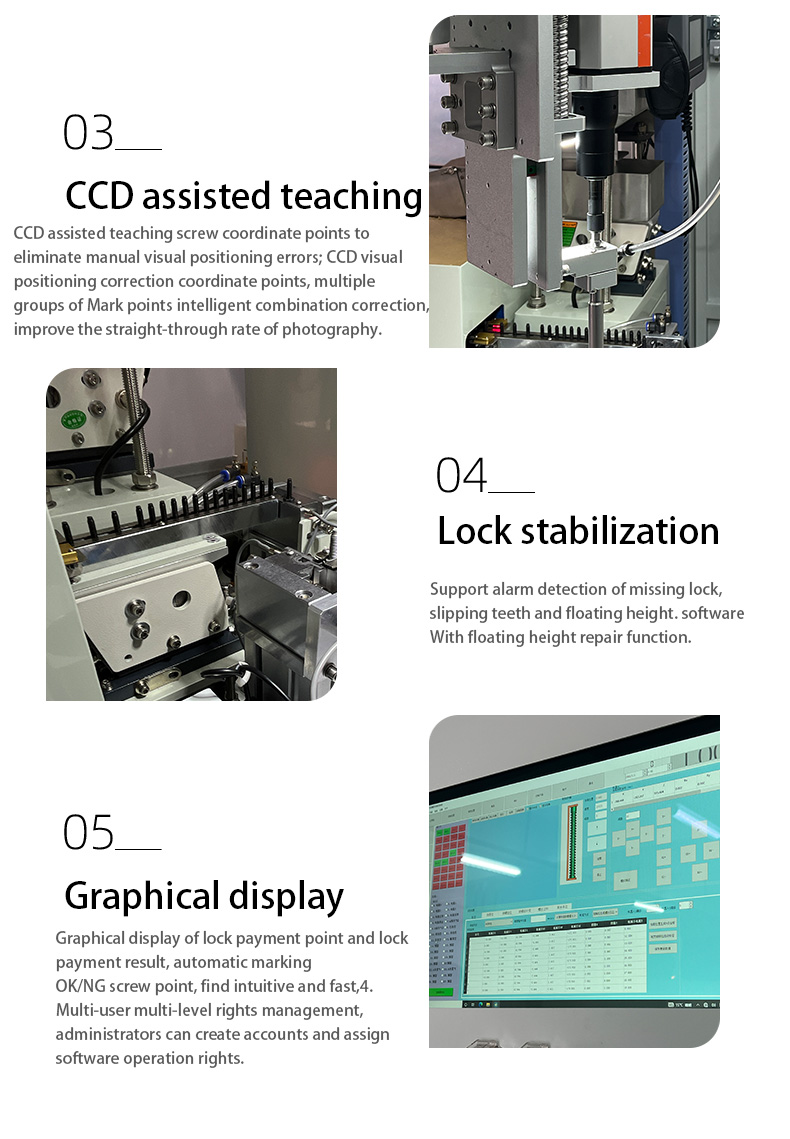
3. Muestra gráficamente el punto de pago de bloqueo y el resultado de pago de bloqueo, marca automáticamente el punto de tornillo OK/NG, búsqueda intuitiva y rápida;
4. Gestión de derechos multiusuario y multinivel: los administradores pueden crear cuentas y asignar derechos de operación de software.
5. Los puntos de coordenadas del tornillo de enseñanza asistido por CCD eliminan los errores de posicionamiento visual manual; los puntos de coordenadas de corrección de posicionamiento visual CCD, la corrección de combinación inteligente de múltiples grupos de puntos de marca, mejoran la tasa de paso de la foto;
6. Admite detección de alarmas por falta de cerradura, dientes resbaladizos y altura flotante. El software incluye la función de reparación de altura flotante.
7.El eje Z se puede configurar con un sensor de desplazamiento láser (para medir la altura de flotación) y un sensor de detección de presión descendente (opcional);
8. El lote eléctrico puede equiparse con lote eléctrico HIOS, lote eléctrico de velocidad Qili, lote eléctrico servo, lote eléctrico inteligente, etc. (opcional);
9. El equipo puede cargar MES según los requisitos del cliente, como torque, número de vueltas, ángulo, curva de torque, estado de bloqueo.
10.Se puede seleccionar escaneo manual y escaneo automático (opcional)
11. Se pueden rastrear los datos de producción y el software incluye un panel de control de calidad. Se pueden cargar y descargar todo tipo de datos (opcional).
12. Verificación automática del punto de torsión, almacenamiento de los resultados de la verificación del punto de torsión y consulta (opcional).

Detalles


Categorías de productos
-

Adsorción tipo hombro con hombro Tornillo apretado...
-

Máquina de apriete de tornillos espalda con espalda
-

Máquina de apriete de tornillos de sobremesa de doble estación
-

Tornillo de adsorción de tipo estación doble vertical T...
-

Máquina de apriete de tornillos tipo soplado de aire
-

Máquina de apriete de tornillos vertical de doble estación





